電気科
中村康樹 木村浩己 小塚晴也 鈴木蛍太 田中 翔 谷川大翔 茂木颯汰
①研究の背景
文化祭に出展し来場者へ楽しんでもらうため。
②仮説とねらい
これまで学んできた制御技術や電子技術を生かしたものづくりに取り組みたい。
③研究内容


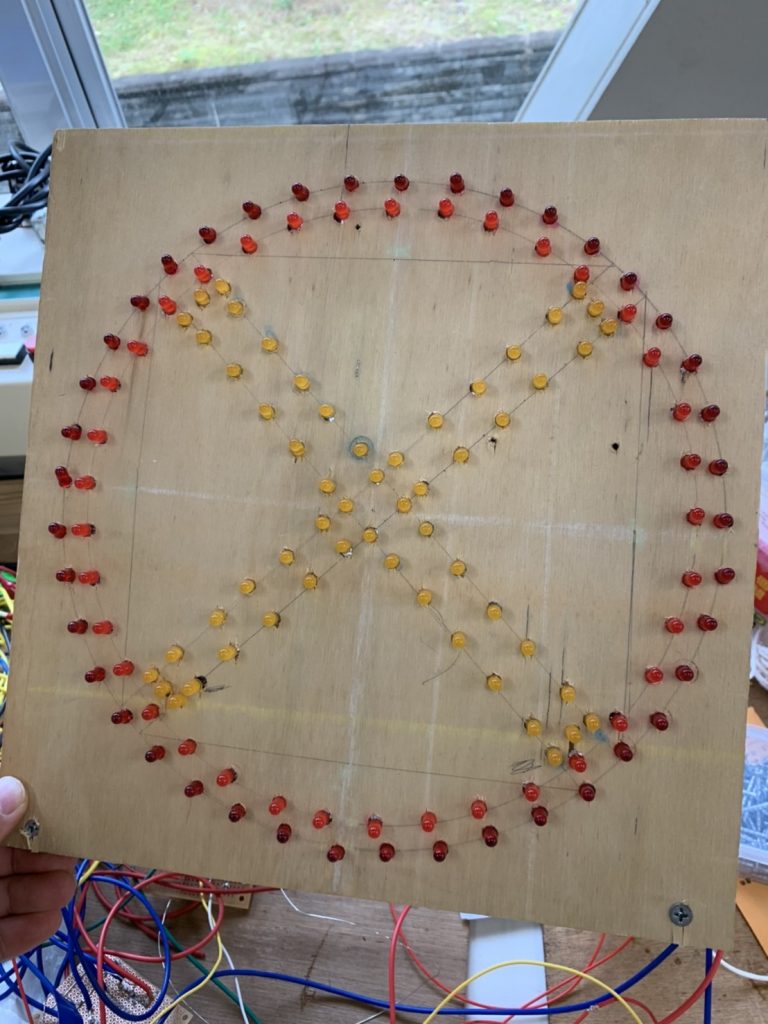
ゴール判定は、ゴールに取り付けられた振動センサを用いて検知し、ゴールなら○をノーゴールなら×の形にLEDを並べた表示板が光るように工夫した。
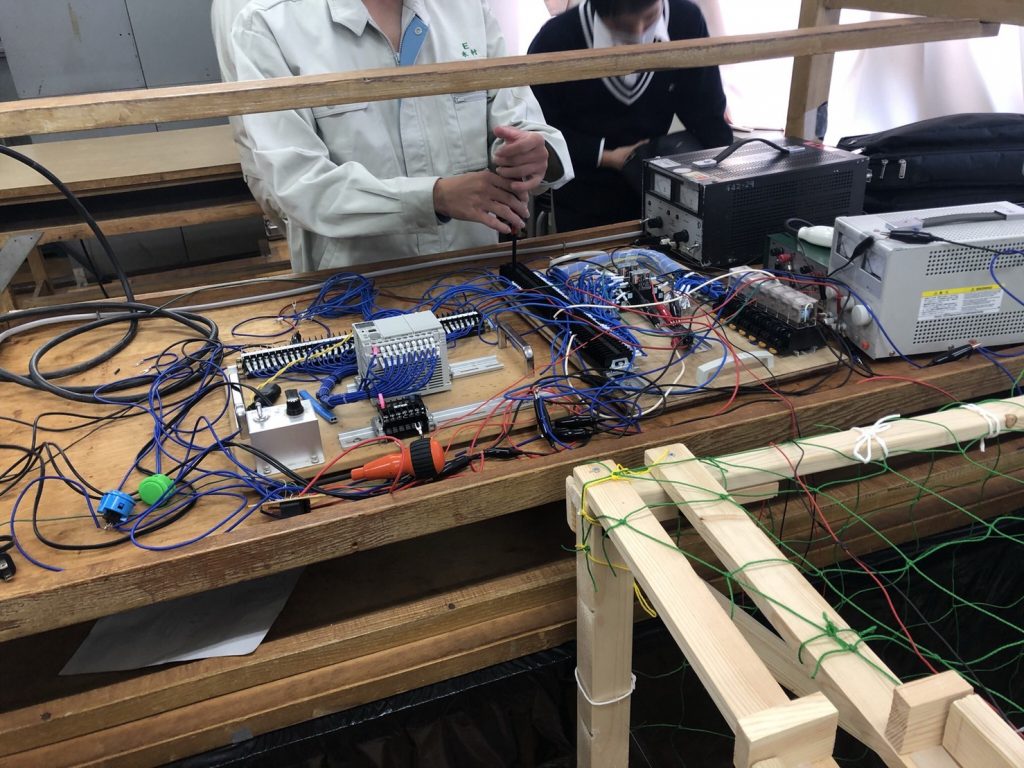
④技術的知識
PLCを用いてアクチュエーターを動作させるため、PLC出力にはリレーを用いた。
振動センサからPLCへのインターフェース回路は、オペアンプを用いた電圧バッファ回路、反転増幅回路を利用した。
⑤これからの取組
今後は得点板の作成や、コンピュータを用いた制御にもチャレンジしてみたい。
⑥まとめ
取組の結果または予想される結果を示して、その価値を伝える。