情報技術科 No.34 牧野航介
①研究の背景
昨年の先輩方の課題研究発表会を見たときに自立制御制御ロボットについて興味を持ち自分もつくってみたいと思った。また、先生からの誘いも受けて参加した。
②仮説とねらい
ロボット製作していく中で基板製作や制御技術などを学びながらつくっていき、メカトロニクスな技術を身につけていく
③研究内容
静岡県高校生ロボット大会のPLC部門のロボットの製作 。今回は33番の前島佑星と共同で製作する。
昨年までの先輩方の反省点、失敗点を改善し、より良いものをつくる
機体は共同で製作し、プログラムは主にフィンガー部分の制御をおこなう
④技術的知識
センサ制御やシーケンス制御、モータ制御はマイコンを通して行う。
基板製作にはkicadを使う
ロボットの外形は3Dプリンタを用いる
⑤取り組んだ取組
ハードウェア
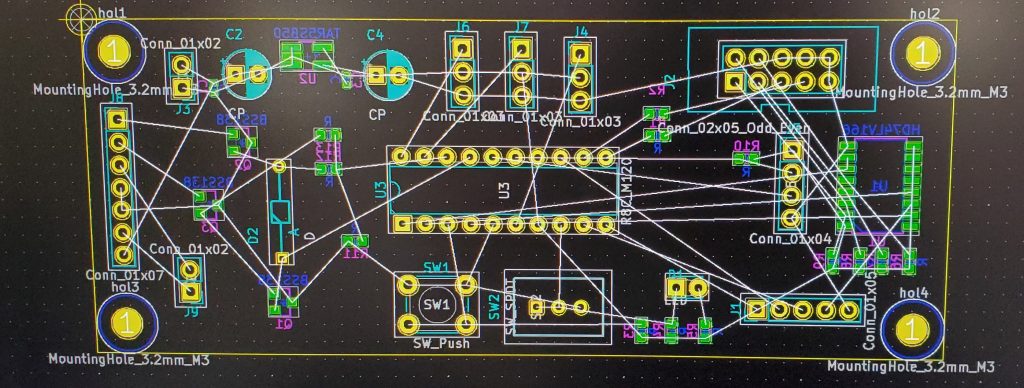
①基板の設計
昨年は基板の接触不良により棄権してしまうという問題があった。よって今回はKicadにより基板設計し、それを外部発注することによって信頼性の高い基板を用いることにした。
➁基板の作成
発注してできた基板をはんだ付けしていき作成していく。

➂機体の作成
3Ⅾプリンタを用いてパーツを作成し、機体を作成していく。パーツは昨年の引継ぎのものの他、下回りは4輪のため4輪用のパーツを使用する。

ソフトウェア
フィンガーのプログラムを担当した。
フィンガーは「オープン」、「キャッチ」、「リリース」の三つの動作をプログラムでつくり、メインからくるコマンドをif文で条件分岐して動作を決める。また、動作状況はintTRBの割り込みで1msごと行いチェックし、既定のボリューム値をこえたら動作を止めるようになっている。メインに送る動作状態(Com_ack)は動作中は”1”、受付中は”0”にしintTRBで送るようになっている。
⑥結果
大会の結果としては優勝することができた。
が、積んだ個数は9個と目標としていたパーフェクト優勝を達成することができなかった。
<原因>
今年は昨年までの「るくる」の施設内ではなく掛川の教育センターの体育館で行われた。それによって今まで比べて外の太陽光があったことと照明が水銀灯のものになっていたことによる外乱光によりブロックセンサーに余分な光が入り誤作動を起こしたためだと考察した。
➆感想・考察
今回は練習段階で安定して12個置きが出来て、大会も優勝することが出来ましたが、目標としていたパーフェクト優勝を果たすことできませんでした。大会を通しては環境の違いにより、動作が変わることから環境による適応性が大切であるとしった。
が、課題研究を通して
問題に対する発見・解決能力
実際に製品開発ができたこと
ハードウェアとソフトウェアを両面で携われたことにより、互いの理解が深まり、作業が何倍も進めることができ、3年間の集大成として満足いくものを することができた
など得るものが多く、これからの社会人になっても活かせる経験をつむことができた。